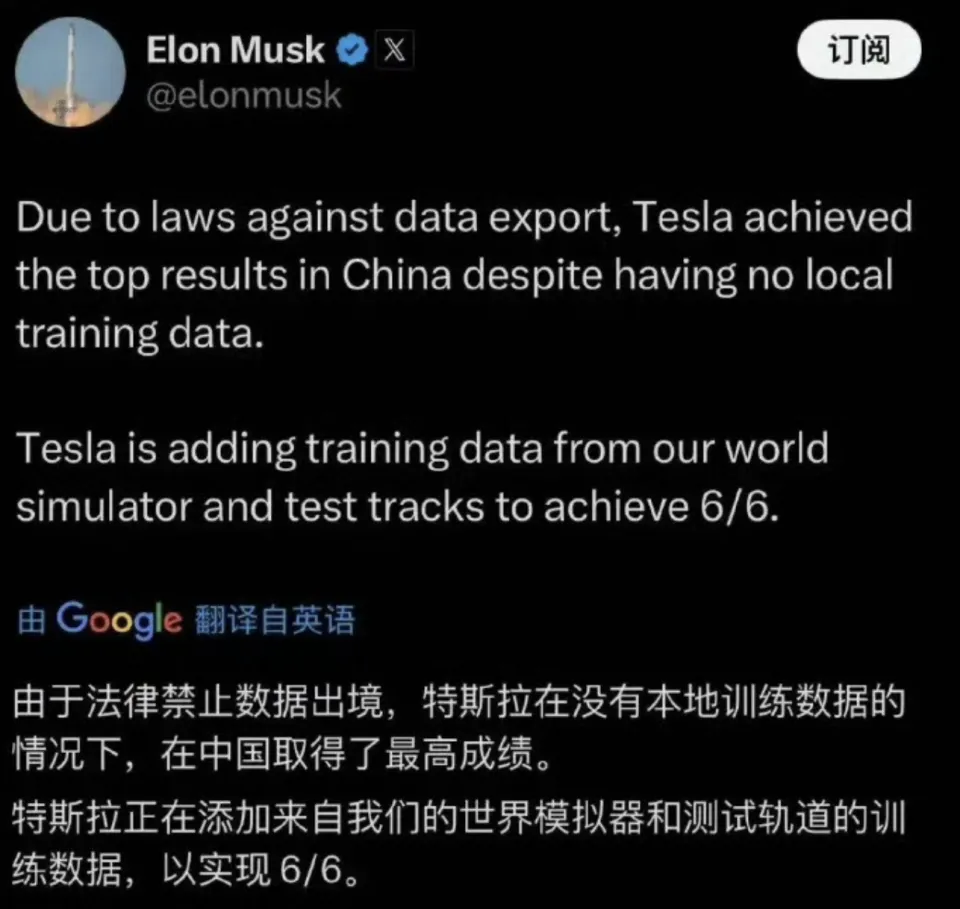
أداء تسلا البارز في اختبار "دونغ تشي دي" يعود إلى حد كبير إلى التزامها الطويل الأمد بتقنية الرؤية البصرية الخالصة. على عكس الحلول الشائعة التي تعتمدها شركات السيارات الأخرى والتي تستخدم "ليزر رادار + رادار ميليمتر + كاميرات" في دمج المستشعرات المتعددة، تعتمد تسلا فقط على الكاميرات لجمع المعلومات البصرية، وتستخدم خوارزميات متقدمة لمعالجة هذه المعلومات لتحقيق الإدراك البيئي والتحكم في القرارات. وقد أظهر هذا الاختيار التكنولوجي عدة مزايا ملحوظة خلال الاختبارات، ولكنه أثار أيضًا جدلاً مستمرًا في الصناعة.
الميزة الاقتصادية هي أكثر جوانب الحل البصري وضوحًا. وفقًا للبيانات الصناعية، فإن تكلفة نظام القيادة الذكية في تسلا موديل 3 أقل بحوالي 40% من تكلفة سيارة "وينجيه M9" المزودة بالليزر رادار. تكلفة الليزر رادار الواحدة لا تزال حوالي 500 دولار، بينما تكلفة الكاميرات العادية التي تستخدمها تسلا لا تتجاوز بضع عشرات من الدولارات. هذه الفجوة في التكلفة تمكن تسلا من الحفاظ على هوامش ربح مرتفعة مع استثمار المزيد من الموارد في تطوير الخوارزميات ومعالجة البيانات. كانت تعليقات المستخدمين على هذا الأمر حادة: "الرؤية البصرية هي الطريق الصحيح، لأن العالم الحقيقي مُعد للبشر، والليزر رادار يهدر تكاليف الأجهزة بلا فائدة".
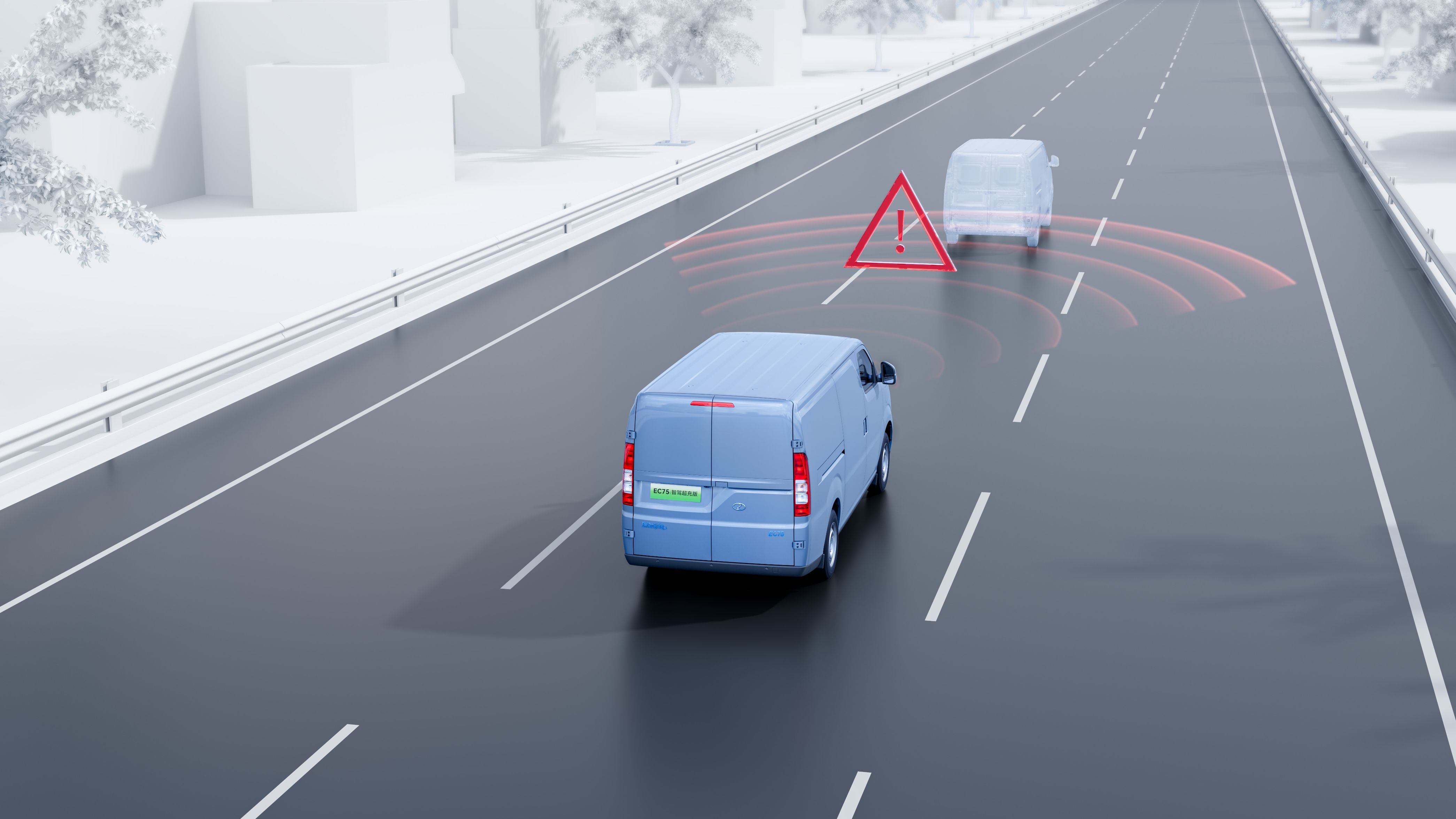
ما كان الأكثر إثارة للإعجاب في الاختبار هو منطق اتخاذ القرار الشبيه بالبشر الذي أظهره نظام تسلا. في سيناريو "مواجهة شاحنة في منطقة بناء"، عندما اقترب موديل 3 من منطقة العائق بسرعة 130 كم/ساعة، لم يكتفِ بالتعرف على العائق أمامه وبدء الكبح في الوقت المناسب، بل أكمل أيضًا سلسلة من العمليات المعقدة مثل تغيير المسار، والتوقف لفترة قصيرة، ثم الالتفاف ببطء، ونجح في المرور في مساحة ضيقة تبلغ 2.55 متر فقط. هذه القدرة على "التعامل بسلاسة وهدوء حتى في مواجهة المواقف الحرجة" تعكس الميزة الأساسية لشبكة تسلا العصبية من النهاية إلى النهاية - ليست مجرد "إدراك-استجابة" بسيطة، بل هي محاكاة لعملية الحكم الشاملة للسائق البشري.
تجديد الهيكل التكنولوجي في تسلا هو أيضًا سبب مهم لأدائها الممتاز. يستخدم نظام FSD V12 هيكل Vision Transformer، مما يتيح تحقيق الربط المباشر من إدخال الصورة إلى أوامر التحكم من خلال نموذج من النهاية إلى النهاية. خوارزمية توقع المسار المتناثر الخاصة بها تقلل من وقت استجابة قرارات التقاطعات المعقدة إلى 120 مللي ثانية، مما يقترب من مستوى الإنسان. والأهم من ذلك، أن نظام تسلا يعتمد تصميم "تدفق قرار واحد"، مما يتجنب مشاكل تضارب الأنظمة المتعددة. في اختبار "دونغ تشي دي"، أدى نظام AEB (الكبح الطارئ التلقائي) في سيناريو البناء إلى قطع وظيفة NCA (المساعدة في الملاحة التلقائية) بشكل قسري، مما أدى إلى انهيار استراتيجية النظام؛ بينما نظام FSD الخاص بتسلا، بفضل استخدامه للهيكل الموحد، لا يعاني من حالة "تضارب اليدين"، مما يجعل القرارات أكثر اتساقًا واستقرارًا.
ومع ذلك، يواجه الحل البصري الخالص العديد من الشكوك والقيود. تأتي الجدل حول طرق الاختبار واختيار السيناريو في المقدمة. أشار مسؤول ADS في هواوي على وسائل التواصل الاجتماعي: "يجب أن تكون المنافسة الحقيقية في القيادة الذكية في مشاهد معقدة مثل القرى الحضرية والأسواق، وليس على الطرق السريعة المغلقة." بالفعل، كانت جميع اختبارات "دونغ تشي دي" على الطرق السريعة، ولم تشمل الظروف الحضرية المعقدة الفريدة في الصين، مثل الانعطاف الأيمن بدون حماية، واختلاط المركبات غير الآلية، وغيرها من السيناريوهات، وهذه هي نقاط الضعف المعترف بها للحل البصري الخالص. أظهرت الاختبارات الفعلية في فبراير من هذا العام أن نظام FSD ارتكب 34 انتهاكًا على الطرق الحضرية في الصين، وكانت قدرته على التعرف على عناصر المرور المحلية مثل ممرات الحافلات وممرات المد والجزر غير كافية بشكل ملحوظ.

اعتماد البيئة هو تحدٍ آخر كبير. قد تنخفض دقة التعرف في الحل البصري الخالص بنسبة 30% في الظروف القاسية مثل الأمطار الغزيرة أو الإضاءة المعاكسة. على الرغم من أن تكوين الأجهزة HW5.0 في تسلا مزود بـ 12 كاميرا مقاومة للعوامل الجوية، مع عدسات مخصصة من سامسونغ مزودة بعناصر تسخين وطلاء مقاوم للماء، مما يسمح بالحفاظ على مسافة كشف فعالة تبلغ 250 مترًا في الطقس الممطر والثلجي، إلا أنه قد تحدث تقلبات في الأداء في البيئات المعقدة الفعلية. بالمقارنة، يمكن أن توفر حلول دمج المستشعرات المتعددة، من خلال قدرة الكشف النشطة لليزر رادار، أداء إدراكي أكثر استقرارًا في ظروف الطقس السيئة.
من الجدير بالذكر أن الطرق التكنولوجية ليست متعارضة تمامًا، حيث تظهر اتجاهات الاندماج في الصناعة. تم تعديل استراتيجية هواوي ADS 3.0 إلى "الليزر رادار هو الأساس، والرؤية هي المساعدة"؛ بينما تسلا أيضًا تقوم بتحسين خوارزمياتها بهدوء، حيث أدخلت النسخة الأحدث FSD Beta 13.2 المزيد من تقنيات تقسيم المعاني، مما زاد من دقة التعرف بنسبة 27%. تتشكل توافقات صناعية تدريجياً: لا توجد طريقة مثلى مطلقة، بل هناك فقط مجموعة من الحلول الأنسب للبيئة السوقية المحددة والنظام التكنولوجي. أداء تسلا في اختبار "دونغ تشي دي" يثبت جدوى الحل البصري الخالص في ظروف معينة، لكنه لا يعني أن هذه الطريقة لها مزايا شاملة في جميع السيناريوهات.
بعد نشر نتائج اختبار القيادة المساعدة من "دونغ تشي دي"، على الرغم من أن أداء تسلا حصل على اهتمام واسع، إلا أن الجدل حول منهجية الاختبار نفسها، ونزاهتها، وتمثيلها قد نشأ أيضًا. تعكس هذه الجدل ليس فقط اهتمام الجمهور بنظام تقييم القيادة الذكية، بل تكشف أيضًا عن نقص الصناعة في بناء المعايير. يعد تحليل هذه النقاط الجدلية أمرًا بالغ الأهمية لفهم المعنى الفعلي لنتائج الاختبار بشكل صحيح.
يعد التحكم في متغيرات الاختبار أحد الجوانب الأكثر جدلاً. أشار العديد من الخبراء في الصناعة وشركات السيارات إلى أن المعلمات الرئيسية في الاختبار مثل سرعة السيارة، والمسافة بين السيارات، لم يتم توحيدها. على سبيل المثال، في اختبار "اختفاء السيارة الأمامية فجأة"، كانت ظروف السيناريو التي تواجهها الطرازات المختلفة مختلفة - بعض السيارات كانت المسار الأيسر فارغًا، مما يسمح بالتجاوز؛ بينما كانت بعض السيارات الأخرى تعاني من ازدحام في المسار الأيسر، مما يجعل التجاوز مستحيلًا. وبالمثل، تم استخدام إعداد "متوسط" مخصص من قبل كل شركة، لكن هذا المعيار يختلف بشكل كبير: قد يتوافق "المتوسط" في تسلا مع مسافة تتراوح حوالي 120 مترًا (7 خطوط بيضاء)، بينما "المتوسط" في وينجيه لا يتجاوز حوالي 45 مترًا (3 خطوط بيضاء). هذه الحالة من عدم التناسق في نقطة البداية تجعل من الصعب مقارنة نتائج الاختبار بشكل أفقي.
ردًا على هذه الشكوك، قالت "دونغ تشي دي": "من المستحيل أن تكون المتغيرات متطابقة تمامًا، لكن المنطق العام قريب من سيناريو الاستخدام الحقيقي على الطرق السريعة، وليس اختبارًا في مختبر قياسي." وأكدوا أن هدف الاختبار ليس معرفة "من هو الأكثر ذكاءً"، بل "من يرتكب أقل الأخطاء". هذا الموقف له بعض المنطق، لأن البيئة الحقيقية على الطرق مليئة بالمتغيرات، ويجب أن تكون أنظمة القيادة الذكية قادرة على التعامل مع عدم اليقين. ومع ذلك، كاختبار مقارن، لا يزال من الضروري التحكم في المتغيرات الرئيسية لضمان علمية النتائج.

تتعلق الجدل حول التدخل البشري بنزاهة عملية الاختبار. في فيديو اختبار سيناريو البناء لسيارة وينجيه M9، أدى انحراف السيارة المفاجئ إلى فشل حركة التجنب، وقد تساءل بعض المستخدمين من خلال الفيديو البطيء عما إذا كان السائق قد تدخل في التحكم في السيارة. أوضح الفنيون في "دونغ تشي دي" أن هذا كان نتيجة لتفعيل نظام AEB مما أدى إلى قطع وظيفة NCA، وليس تدخلًا بشريًا. على الرغم من أن هذا التفسير منطقي، إلا أنه يكشف أيضًا عن نقص الشفافية في عملية الاختبار - إذا كان بإمكان الجهة المختبرة نشر إجراءات التشغيل ومعايير التقييم بشكل أكثر تفصيلًا مسبقًا، فقد يمكن تجنب مثل هذه الجدل.
الجدل الأكثر جوهرية يتعلق بتمثيل سيناريوهات الاختبار. تركز اختبارات "دونغ تشي دي" على 15 سيناريو عالي المخاطر، جميعها في ظروف معيارية محددة مسبقًا. بينما البيئة الحقيقية على الطرق أكثر تعقيدًا وتغيرًا، خاصة الظواهر المرورية الفريدة في المدن الصينية مثل عبور الدراجات الكهربائية بشكل عشوائي، وعبور المشاة للحواجز، وعودة المركبات غير الآلية، لم يتم تمثيلها في الاختبار. انتقد مسؤول ADS في هواوي هذا الأمر بشكل دقيق: "يجب أن تكون المنافسة الحقيقية في القيادة الذكية في مشاهد معقدة مثل القرى الحضرية والأسواق." إن قيود سيناريوهات الاختبار تجعل من الصعب أن تعكس النتائج الفروق في أداء الأنظمة في الاستخدام الفعلي بشكل شامل.
تستحق ردود الشركات على الشكوك أيضًا الانتباه. أشار بعض المستخدمين إلى أن المستثمرين وراء "دونغ تشي دي"، مثل "سيكويا كابيتال"، استثمروا أيضًا في تسلا، مما أثار الشكوك حول إمكانية وجود تحيز في الاختبار بسبب "تداخل رأس المال". على الرغم من أن "دونغ تشي دي" أكدت أن الاختبار تم تنظيمه بالتعاون مع CCTV، وتم تسجيله بالكامل دون أي قطع، إلا أن الروابط المالية قد تؤثر بالفعل على ثقة الجمهور. كما أن رد "هونغمنغ تشيكسينغ" الرسمي "لا تعليق" يشير أيضًا إلى تحفظ بعض شركات السيارات بشأن نزاهة الاختبار.
تظهر هذه الجدل خلفية عميقة تتعلق بنقص نظام المعايير في صناعة القيادة الذكية. حتى الآن، لم تقم الصين بإنشاء معايير موحدة لتقييم اختبارات القيادة الذكية على المستوى الوطني أو الصناعي، حيث تقوم كل جهة تقييم بتصميم خطط الاختبار الخاصة بها، مما يجعل من الصعب مقارنة النتائج. كانت اقتراحات لي شيانغ، الرئيس التنفيذي لشركة لي أوتو، بناءة للغاية: "يجب إنشاء معيار اختبار موحد يتضمن 100,000 سيناريو، يشمل الظروف القاسية مثل الأمطار الغزيرة، والليل، والأنفاق." ومن المعروف أن جمعية صناعة السيارات الصينية قد بدأت العمل على وضع "معايير تقييم اختبار أنظمة القيادة الذكية"، والتي من المقرر تنفيذها في عام 2026، مما سيساعد في تعزيز علمية وموثوقية تقييمات الصناعة.
مشكلة رئيسية أخرى هي حدود وظائف نظام L2. جميع الطرازات التي تم اختبارها مزودة بنظام قيادة مساعد من المستوى L2، والذي تم تصميمه لمساعدة السائقين البشريين وليس لاستبدالهم. صرح نائب مدير إدارة المرور في وزارة الأمن العام، وانغ تشيانغ، بوضوح: "جميع السيارات المباعة في السوق الصينية مزودة بأنظمة القيادة الذكية، لكنها لا تمتلك وظائف القيادة الذاتية." وهذا يعني أنه بغض النظر عن نتائج الاختبار، يجب على السائقين الحفاظ على انتباههم طوال الوقت، والاستعداد لاستعادة السيطرة على السيارة في أي لحظة. وقد أدى الترويج المفرط من بعض شركات السيارات لقدرات "القيادة الذاتية" إلى توقعات غير واقعية من قبل المستهلكين بشأن أداء النظام، وهو ما يفسر أيضًا الفجوة بين نتائج الاختبار وإدراك الجمهور.