Teslas herausragende Leistung im Test von Dongchedi ist zu einem großen Teil auf den langfristigen Fokus auf eine rein visuelle Technologie-Route zurückzuführen. Im Gegensatz zu dem von anderen Automobilherstellern allgemein verwendeten Ansatz der "Lidar + Millimeterwellenradar + Kameras" zur multisensorischen Fusion verlässt sich Tesla ausschließlich auf Kameras zur Erfassung visueller Informationen und nutzt fortschrittliche Algorithmen zur Verarbeitung, um Umweltwahrnehmung und Entscheidungssteuerung zu realisieren. Diese technische Wahl zeigte im Test mehrere bemerkenswerte Vorteile, führte jedoch auch zu anhaltenden Kontroversen in der Branche.
Der Kostenvorteil ist die offensichtlichste Wettbewerbsfähigkeit des rein visuellen Ansatzes. Branchenberichte zeigen, dass die Kosten des intelligenten Fahrassistenzsystems des Tesla Model 3 etwa 40 % niedriger sind als die des mit Lidar ausgestatteten Wanjie M9. Die Einzelkosten für Lidar liegen derzeit bei etwa 500 US-Dollar, während die Kosten für die von Tesla verwendeten Standardkameras nur einige Dutzend Dollar betragen. Diese Kostenunterschiede ermöglichen es Tesla, bei gleichzeitiger Beibehaltung einer hohen Gewinnspanne mehr Ressourcen in die Algorithmusentwicklung und Datenverarbeitung zu investieren. Die Kommentare der Internetnutzer dazu sind scharf: "Rein visuell ist der richtige Weg, denn die reale Welt ist für Menschen gemacht, Lidar verschwendet nur Hardwarekosten."
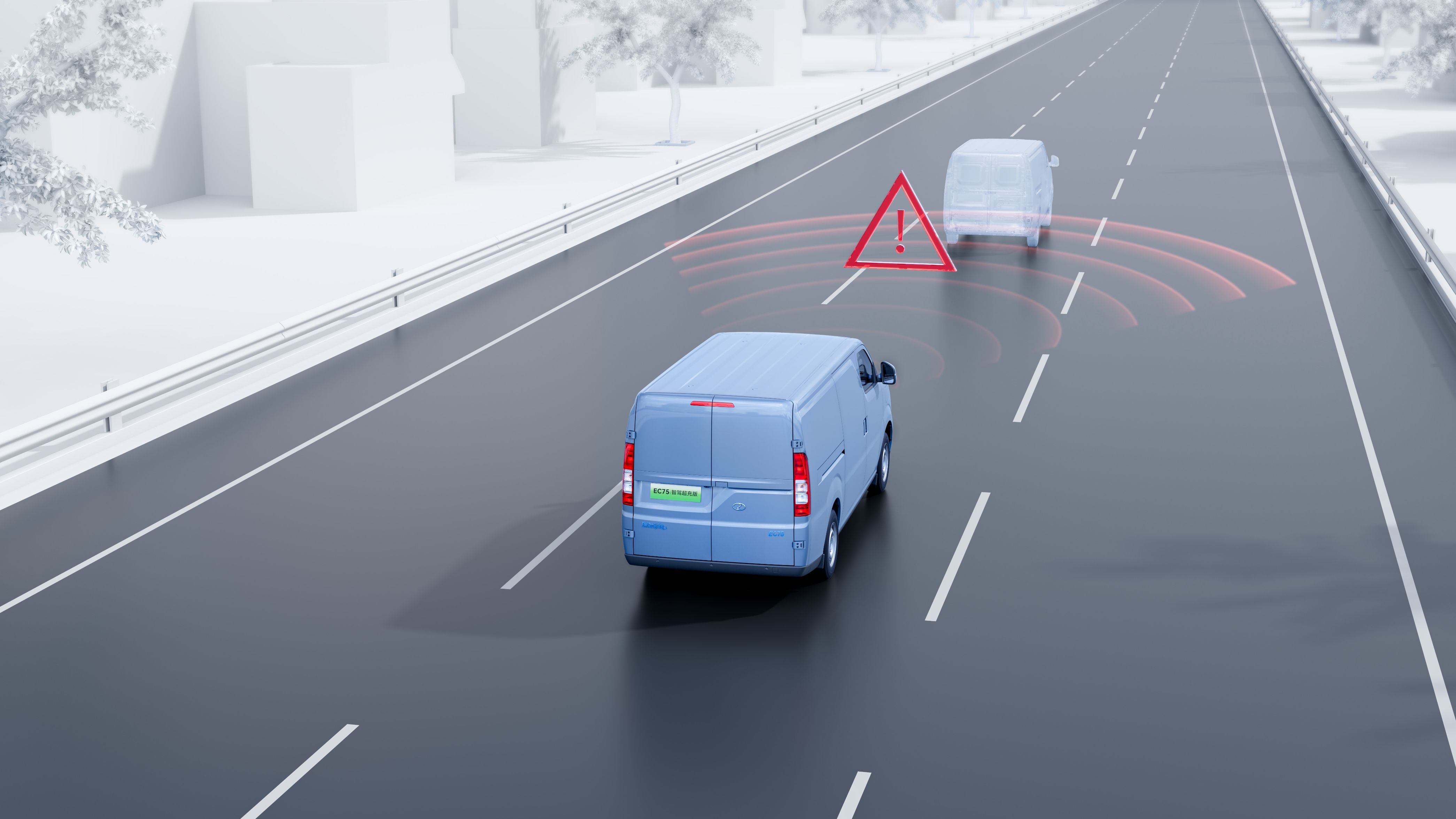
Am beeindruckendsten im Test war die menschenähnliche Entscheidungslogik, die das Tesla-System zeigte. Im Szenario "Bauarbeiten mit einem Lkw" näherte sich das Model 3 mit 130 km/h der Hinderniszone, erkannte nicht nur rechtzeitig das Hindernis vor ihm und leitete eine Bremsung ein, sondern führte auch eine Reihe komplexer Operationen wie das Spurwechseln und langsames Umfahren nach einer kurzen Pause durch und passierte schließlich erfolgreich einen nur 2,55 Meter breiten Raum. Diese Fähigkeit, "ruhig und geschmeidig, sogar 'logisch' auf kritische Szenarien zu reagieren", spiegelt den Kernvorteil von Teslas End-to-End-Neuronalen Netzwerk wider – es handelt sich nicht nur um einfaches "Wahrnehmen-Reagieren", sondern um den simulierten Gesamturteilungsprozess eines menschlichen Fahrers.
Die Innovation der technischen Architektur von Tesla ist ebenfalls ein wichtiger Grund für seine hervorragende Leistung. FSD V12 verwendet die Vision Transformer-Architektur, um durch ein End-to-End-Modell direkt die Zuordnung von Bildinput zu Steuerbefehlen zu realisieren. Der Algorithmus zur sparsamen Trajektorienvorhersage verkürzt die Reaktionszeit für komplexe Kreuzungsentscheidungen auf 120 Millisekunden, was nahezu menschlichem Niveau entspricht. Noch wichtiger ist, dass das Tesla-System ein "einheitliches Entscheidungsfluss"-Design verwendet, das Probleme mit Konflikten zwischen mehreren Systemen vermeidet. Im Test von Dongchedi wurde das NCA (Automatische Navigationshilfe) des Wanjie M9 in einem Bauszenario aufgrund der Auslösung des AEB (Automatische Notbremsung) gezwungen, die Funktion zu unterbrechen, was zu einem Zusammenbruch der Systemstrategie führte; während Teslas FSD-System aufgrund der Verwendung einer einheitlichen Architektur keine "Gegensätze zwischen den Händen" aufweist, was die Entscheidungsfindung kohärenter und stabiler macht.
Allerdings sieht sich der rein visuelle Ansatz auch vielen Zweifeln und Einschränkungen gegenüber. Die Kontroversen über die Testmethoden und die Auswahl der Szenarien stehen an erster Stelle. Der Leiter von Huaweis ADS wies in sozialen Medien darauf hin: "Echter Wettbewerb im intelligenten Fahren sollte in komplexen Szenarien wie Stadtteilen und Gemüse- und Obstmärkten stattfinden, nicht auf geschlossenen Autobahnen." Tatsächlich waren alle Tests von Dongchedi auf Autobahnszenarien beschränkt und schlossen die in China typischen komplexen städtischen Verkehrsbedingungen wie ungeschützte Rechtsabbiegen und das Mischen von nicht motorisierten Fahrzeugen nicht ein, die allgemein als Schwächen des rein visuellen Ansatzes anerkannt sind. Eine praktische Messung im Februar dieses Jahres zeigte, dass FSD auf chinesischen Stadtstraßen 34 Verkehrsverstöße aufwies und die Erkennungsfähigkeit für lokale Verkehrselemente wie Busspuren und Gezeitenfahrspuren deutlich unzureichend war.

Die Abhängigkeit von der Umgebung ist eine weitere große Herausforderung. Die Erkennungsgenauigkeit des rein visuellen Ansatzes kann bei extremen Bedingungen wie starkem Regen oder Gegenlicht um 30 % sinken. Obwohl die HW5.0-Hardware von Tesla mit 12 wetterfesten Kameras ausgestattet ist, die mit maßgeschneiderten Samsung-Objektiven, Heizkomponenten und wasserabweisenden Beschichtungen ausgestattet sind und bei Regen und Schnee eine effektive Erkennungsreichweite von 250 Metern aufrechterhalten können, kann es in tatsächlichen komplexen Umgebungen dennoch zu Leistungsschwankungen kommen. Im Vergleich dazu kann der multisensorische Fusionsansatz durch die aktive Erkennungsfähigkeit des Lidars unter schlechten Wetterbedingungen eine stabilere Wahrnehmungsleistung bieten.
Es ist bemerkenswert, dass die technischen Routen nicht vollständig gegensätzlich sind und in der Branche ein Trend zur Fusion entsteht. Huaweis ADS 3.0 hat sich bereits auf die Strategie "Lidar als Hauptsache, Vision als Unterstützung" umgestellt; während Tesla auch heimlich die Algorithmen verbessert hat, wobei die neueste FSD Beta 13.2-Version mehr Technologien zur semantischen Segmentierung eingeführt hat, was die Erkennungsgenauigkeit um 27 % erhöht hat. Es bildet sich allmählich ein Branchenkonsens: Es gibt keinen absolut optimalen Weg, sondern nur die Kombination, die am besten zu bestimmten Marktbedingungen und technologischen Ökosystemen passt. Teslas Leistung im Test von Dongchedi beweist die Machbarkeit des rein visuellen Ansatzes unter bestimmten Bedingungen, bedeutet jedoch nicht, dass dieser Ansatz in allen Szenarien universelle Vorteile hat.
Nach der Veröffentlichung der Testergebnisse des Fahrassistenzsystems von Dongchedi erhielt Teslas Leistung zwar viel Aufmerksamkeit, aber die Kontroversen über die Methodologie, Fairness und Repräsentativität des Tests nahmen ebenfalls zu. Diese Kontroversen spiegeln nicht nur das öffentliche Interesse an den Bewertungssystemen für intelligentes Fahren wider, sondern offenbaren auch die Mängel der Branche im Bereich der Standardisierung. Eine eingehende Analyse dieser Streitpunkte ist entscheidend für das richtige Verständnis der tatsächlichen Bedeutung der Testergebnisse.
Die Kontrolle der Testvariablen ist einer der am meisten angezweifelten Aspekte. Mehrere Branchenexperten und Automobilhersteller wiesen darauf hin, dass wichtige Parameter wie Geschwindigkeit und Abstand im Test nicht standardisiert wurden. Zum Beispiel gab es im Test "Plötzliches Verschwinden des Fahrzeugs vor einem" Unterschiede in den Szenarien, mit denen verschiedene Fahrzeugmodelle konfrontiert waren – einige Fahrzeuge hatten die linke Spur frei und konnten ausweichen; während andere Fahrzeuge die linke Spur durch andere Fahrzeuge blockiert hatten und nicht ausweichen konnten. Ebenso wurde der Abstand zum Vordermann mit einer von den Automobilherstellern selbst definierten "mittleren" Einstellung verwendet, aber dieser Standard variiert erheblich: Teslas "mittel" könnte etwa 120 Meter Abstand (7 weiße Linien) entsprechen, während Wanjies "mittel" nur etwa 45 Meter (3 weiße Linien) beträgt. Diese Inkonsistenz in der Ausgangslage macht es schwierig, die Testergebnisse horizontal zu vergleichen.
Angesichts dieser Zweifel antwortete Dongchedi: "Variablen können tatsächlich nicht vollständig identisch sein, aber die Gesamtlogik ist nah an realen Hochgeschwindigkeitsnutzungsszenarien und nicht an standardisierten Labortests." Sie betonten, dass das Ziel des Tests nicht darin besteht, zu sehen, "wer am klügsten ist", sondern "wer die wenigsten Fehler macht". Diese Position hat eine gewisse Berechtigung, da die realen Straßenbedingungen voller Variablen sind und intelligente Fahrassistenzsysteme die Fähigkeit haben müssen, mit Unsicherheiten umzugehen. Dennoch bleibt die angemessene Kontrolle der Schlüsselvariablen als grundlegende Anforderung zur Gewährleistung der wissenschaftlichen Validität der Ergebnisse wichtig.

Die Kontroversen über menschliche Eingriffe betreffen die Fairness des Testprozesses. Im Testvideo des Wanjie M9 in einem Bauszenario lenkte das Fahrzeug plötzlich, was zu einem misslungenen Ausweichmanöver führte, und einige Internetnutzer bezweifelten durch Zeitlupe, dass der Fahrer in die Fahrzeugkontrolle eingegriffen hatte. Die Techniker von Dongchedi erklärten, dass dies auf einen Systemkonflikt zurückzuführen sei, der auftrat, nachdem das AEB-System ausgelöst wurde und die NCA-Funktion unterbrochen wurde, und nicht auf menschliches Eingreifen. Diese Erklärung ist zwar nachvollziehbar, offenbart jedoch auch das Problem unzureichender Transparenz im Testprozess – wenn die Testseite im Voraus detailliertere Betriebsanweisungen und Bewertungsstandards veröffentlichen könnte, könnten solche Kontroversen möglicherweise vermieden werden.
Eine grundlegendere Kontroverse betrifft die Repräsentativität der Testszenarien. Die Tests von Dongchedi konzentrierten sich auf 15 hochriskante Szenarien, die alle vordefinierte standardisierte Situationen waren. Die realen Straßenbedingungen sind jedoch weitaus komplexer und variabler, insbesondere die in chinesischen Städten typischen Verkehrssituationen wie das ungehinderte Fahren von Elektrofahrrädern, Fußgänger, die über Absperrungen springen, und nicht motorisierte Fahrzeuge, die entgegen der Fahrtrichtung fahren, wurden in den Tests nicht berücksichtigt. Die Kritik des Leiters von Huaweis ADS trifft den Nagel auf den Kopf: "Echter Wettbewerb im intelligenten Fahren sollte in komplexen Szenarien wie Stadtteilen und Gemüse- und Obstmärkten stattfinden." Die Einschränkungen der Testszenarien machen es schwierig, die Ergebnisse umfassend zu reflektieren, wie sich die verschiedenen Systeme in der tatsächlichen Nutzung unterscheiden.
Die markenspezifischen Reaktionen auf die Zweifel sind ebenfalls bemerkenswert. Einige Internetnutzer wiesen darauf hin, dass der Investor hinter Dongchedi, Sequoia Capital, auch in Tesla investiert hat, und bezweifelten, dass der Test möglicherweise eine "Kapitalverzerrung" aufweist. Obwohl Dongchedi betont, dass der Test in Zusammenarbeit mit dem CCTV organisiert wurde und die gesamte Aufzeichnung ungeschnitten ist, könnte die Kapitalverbindung tatsächlich das öffentliche Vertrauen beeinflussen. Die kühle Antwort von Hongmeng Zhixing, die "keinen Kommentar abgeben" wollte, deutet ebenfalls auf eine zurückhaltende Haltung einiger Automobilhersteller gegenüber der Fairness des Tests hin.
Hinter diesen Kontroversen verbirgt sich ein tiefgreifendes Problem des Fehlens eines Standardsystems in der intelligenten Fahrindustrie. Derzeit hat China noch keinen einheitlichen nationalen oder branchenspezifischen Standard für die Bewertung von intelligenten Fahrtests etabliert, und jede Bewertungsstelle entwirft ihre eigenen Testpläne, was es schwierig macht, die Ergebnisse miteinander zu vergleichen. Der CEO von Ideal Automobile, Li Xiang, hat einen konstruktiven Vorschlag gemacht: "Es sollte einen einheitlichen Teststandard mit 100.000 Szenarien geben, der extreme Umgebungen wie starken Regen, Nachtfahrten und Tunnel abdeckt." Berichten zufolge hat die Chinesische Automobilindustrie-Vereinigung die Arbeit an der Erstellung der "Normen für die Bewertung von intelligenten Fahrassistenzsystemen" aufgenommen, die 2026 in Kraft treten sollen, was dazu beitragen wird, die wissenschaftliche Validität und Glaubwürdigkeit der Branchenbewertungen zu verbessern.
Ein weiteres zentrales Problem sind die Funktionsgrenzen von L2-Systemen. Alle getesteten Fahrzeugmodelle waren mit L2-fähigen Fahrassistenzsystemen ausgestattet, deren ursprünglicher Zweck darin besteht, den menschlichen Fahrer zu unterstützen und nicht zu ersetzen. Wang Qiang, stellvertretender Direktor der Verkehrspolizei des Ministeriums für öffentliche Sicherheit, erklärte ausdrücklich: "Die derzeit auf dem Markt verkauften Fahrzeuge mit intelligenten Fahrassistenzsystemen verfügen nicht über autonome Fahrfunktionen." Das bedeutet, dass die Fahrer, unabhängig von den Testergebnissen, jederzeit aufmerksam bleiben und bereit sein müssen, das Fahrzeug zu übernehmen. Einige Automobilhersteller übertreiben die "autonomen Fahrfähigkeiten", was zu unrealistischen Erwartungen der Verbraucher an die Systemleistung führt, was auch der Grund für die Diskrepanz zwischen den Testergebnissen und der öffentlichen Wahrnehmung ist.