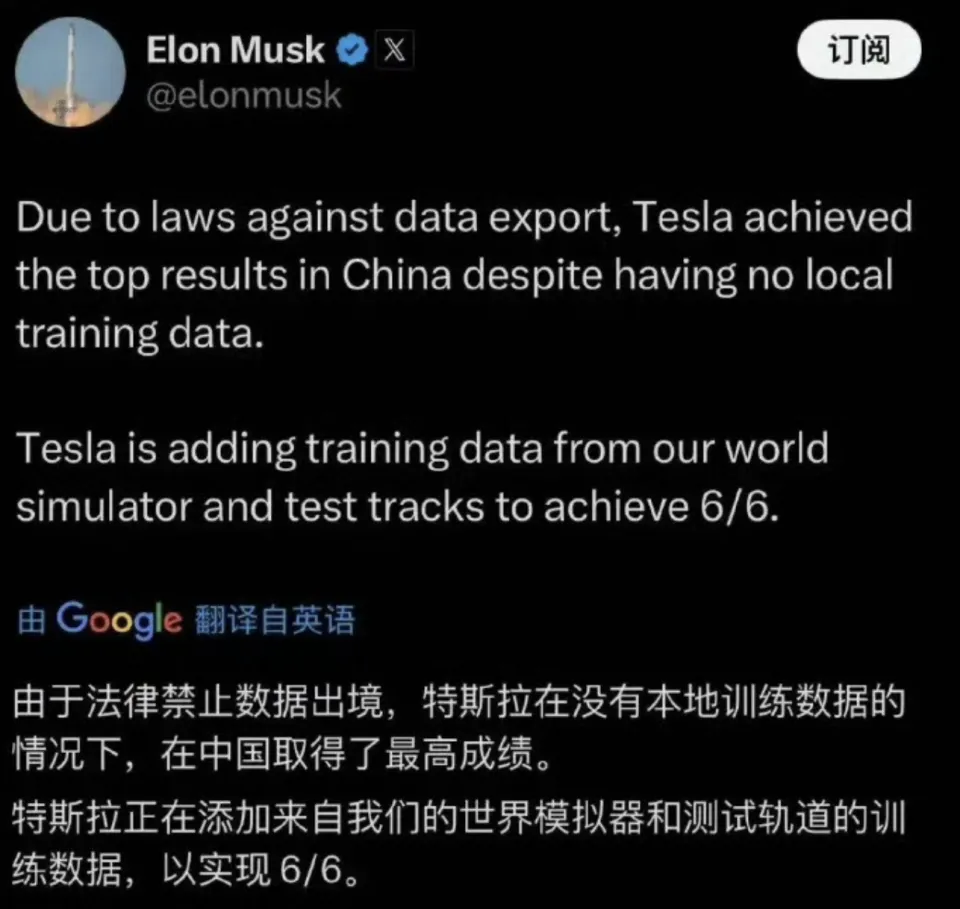
El destacado rendimiento de Tesla en las pruebas de Dongche Di se debe en gran medida a su enfoque a largo plazo en la tecnología de visión pura. A diferencia de la solución de fusión de múltiples sensores que utilizan otras empresas automotrices, que generalmente combina "lidar + radar de milímetros + cámaras", Tesla se basa únicamente en cámaras para recopilar información visual y utiliza algoritmos avanzados para procesar y lograr la percepción del entorno y el control de decisiones. Esta elección tecnológica mostró varias ventajas significativas en las pruebas, aunque también generó controversias continuas en la industria.
La ventaja de costo-efectividad es la competencia más intuitiva de la solución de visión pura. Según datos de la industria, el sistema de conducción inteligente del Tesla Model 3 tiene un costo aproximadamente un 40% menor que el del Wanjie M9, que está equipado con lidar. El costo unitario del lidar sigue siendo de alrededor de 500 dólares, mientras que el costo de las cámaras comunes utilizadas por Tesla es de solo unas decenas de dólares. Esta diferencia de costos permite a Tesla invertir más recursos en el desarrollo de algoritmos y procesamiento de datos, manteniendo al mismo tiempo un margen de beneficio relativamente alto. Los comentarios de los internautas son bastante incisivos: "La visión pura es el camino correcto, porque el mundo real está diseñado para los humanos, el lidar desperdicia innecesariamente el costo del hardware".
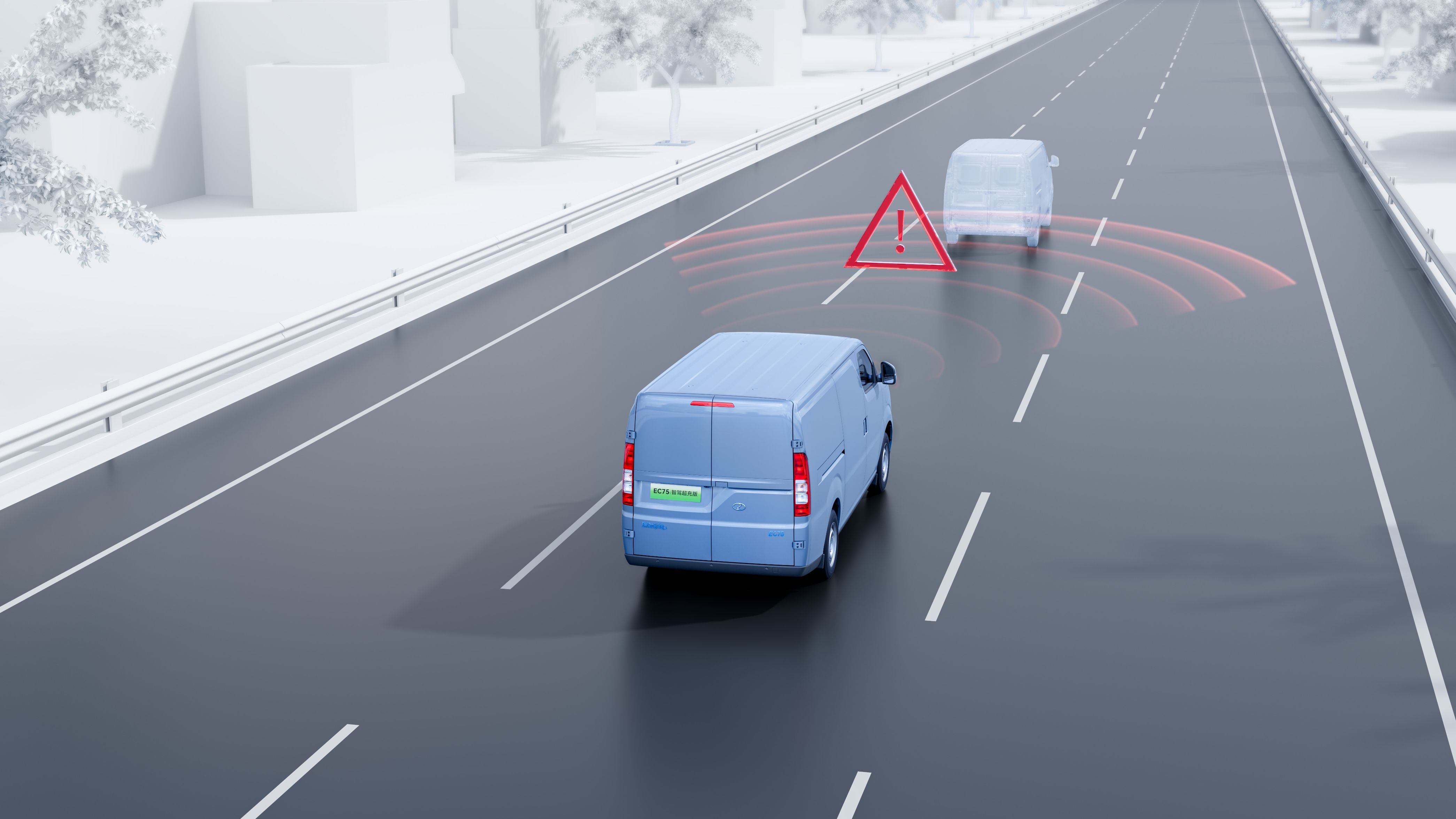
Lo más impresionante en las pruebas fue la lógica de decisión similar a la humana que mostró el sistema de Tesla. En la escena de "encontrarse con un camión en una zona de construcción", cuando el Model 3 se acercó a la zona de obstáculos a 130 km/h, no solo identificó a tiempo el obstáculo adelante y activó los frenos, sino que también realizó una serie de operaciones complejas como cambiar de carril y rodear lentamente después de una breve pausa, logrando finalmente pasar con éxito en un espacio estrecho de solo 2.55 metros. Esta capacidad de "responder a situaciones críticas de manera suave y lógica" refleja la ventaja central de la red neuronal de extremo a extremo de Tesla: no es simplemente "percepción-reacción", sino que simula el proceso de juicio integral de un conductor humano.
La innovación en la arquitectura técnica de Tesla también es una razón importante de su excelente rendimiento. El FSD V12 utiliza la arquitectura Vision Transformer, logrando directamente la asignación de entrada de imagen a instrucciones de control a través de un modelo de extremo a extremo. Su algoritmo de predicción de trayectoria esparcida reduce el tiempo de respuesta para decisiones en intersecciones complejas a 120 milisegundos, acercándose al nivel humano. Más importante aún, el sistema de Tesla adopta un diseño de "flujo de decisión único", evitando problemas de conflicto entre múltiples sistemas. En las pruebas de Dongche Di, el Wanjie M9 interrumpió forzosamente la función NCA (asistencia de navegación automática) debido a la activación del AEB (frenado automático de emergencia) en la escena de construcción, lo que llevó al colapso de la estrategia del sistema; mientras que el sistema FSD de Tesla, al utilizar una arquitectura unificada, no presenta situaciones de "conflicto entre manos", lo que hace que la toma de decisiones sea más coherente y estable.
Sin embargo, la solución de visión pura también enfrenta muchas dudas y limitaciones. La controversia sobre los métodos de prueba y la selección de escenas es la más prominente. El responsable de Huawei ADS señaló en las redes sociales: "La verdadera competencia de conducción inteligente debería llevarse a cabo en escenarios complejos como aldeas urbanas y mercados de alimentos, y no en autopistas cerradas". De hecho, todas las pruebas de Dongche Di se realizaron en escenarios de autopista, sin incluir las complejas condiciones de tráfico urbano únicas de China, como giros a la derecha sin protección y la mezcla de vehículos no motorizados, que son precisamente las debilidades reconocidas de la solución de visión pura. Las pruebas realizadas en febrero de este año mostraron que el FSD cometió 34 infracciones en las carreteras urbanas de China, y su capacidad para reconocer elementos de tráfico locales como carriles exclusivos para autobuses y carriles de marea es claramente insuficiente.

La dependencia del entorno es otro gran desafío. La tasa de precisión de reconocimiento de la solución de visión pura puede disminuir un 30% en condiciones extremas como lluvias intensas o contraluz. Aunque el hardware HW5.0 de Tesla está equipado con 12 cámaras resistentes a las inclemencias del tiempo, utilizando lentes personalizados de Samsung junto con elementos calefactores y recubrimientos hidrofóbicos, que pueden mantener una distancia de detección efectiva de 250 metros en condiciones de lluvia y nieve, aún puede haber fluctuaciones en el rendimiento en entornos complejos reales. En comparación, la solución de fusión de múltiples sensores, a través de la capacidad de detección activa del lidar, puede proporcionar un rendimiento de percepción más estable en condiciones climáticas adversas.
Es importante notar que las rutas tecnológicas no son completamente opuestas, y está surgiendo una tendencia de fusión en la industria. Huawei ADS 3.0 ya ha ajustado su estrategia a "lidar como principal, visión como secundaria"; mientras que Tesla también está mejorando silenciosamente sus algoritmos, con la última versión FSD Beta 13.2 que introduce más tecnología de segmentación semántica, aumentando la precisión de reconocimiento en un 27%. Se está formando un consenso en la industria: no hay una ruta óptima absoluta, solo combinaciones que son más adecuadas para entornos de mercado y ecosistemas tecnológicos específicos. El rendimiento de Tesla en las pruebas de Dongche Di demuestra la viabilidad de la solución de visión pura en condiciones específicas, pero no significa que esta ruta tenga ventajas universales en todos los escenarios.
Después de la publicación de los resultados de las pruebas de asistencia de conducción de Dongche Di, aunque el rendimiento de Tesla recibió una amplia atención, también surgieron controversias sobre la metodología, la imparcialidad y la representatividad de la prueba en sí. Estas controversias no solo reflejan la atención del público hacia el sistema de evaluación de conducción inteligente, sino que también revelan la falta de estandarización en la industria. Analizar en profundidad estos puntos de controversia es crucial para comprender correctamente el significado real de los resultados de las pruebas.
El control de variables en las pruebas es uno de los aspectos más cuestionados. Varios expertos de la industria y empresas automotrices señalaron que parámetros clave en las pruebas, como la velocidad del vehículo y la distancia de seguimiento, no tenían un estándar unificado. Por ejemplo, en el proyecto de prueba "desaparición repentina del vehículo delantero", las condiciones de escena que enfrentan diferentes modelos de vehículos varían: algunos vehículos tienen el carril izquierdo vacío y pueden rodear; mientras que otros tienen el carril izquierdo ocupado por otros vehículos, lo que hace imposible rodear. Del mismo modo, la distancia de seguimiento utilizó una configuración "media" personalizada por cada empresa automotriz, pero esta norma varía enormemente: la "media" de Tesla puede corresponder a una distancia de seguimiento de aproximadamente 120 metros (7 líneas blancas), mientras que la "media" de Wanjie es de solo aproximadamente 45 metros (3 líneas blancas). Esta inconsistencia en la línea de partida dificulta la comparación horizontal de los resultados de las pruebas.
Frente a estas dudas, Dongche Di respondió: "Las variables no pueden ser completamente consistentes, pero la lógica general se acerca a los escenarios de uso real en autopistas, y no se trata de realizar pruebas en un laboratorio estándar". Enfatizaron que el objetivo de la prueba no es ver "quién es el más inteligente", sino "quién comete menos errores". Esta postura tiene cierta razonabilidad, ya que el entorno real de las carreteras está lleno de variables, y los sistemas de conducción inteligente deben tener la capacidad de enfrentar la incertidumbre. Sin embargo, como comparación, controlar adecuadamente las variables clave sigue siendo un requisito básico para garantizar la validez científica de los resultados.

La controversia sobre la intervención humana se refiere a la imparcialidad del proceso de prueba. En el video de prueba de la escena de construcción del Wanjie M9, el vehículo giró repentinamente, lo que llevó a un fallo en la maniobra de evasión, y algunos internautas cuestionaron a través de un video en cámara lenta si el conductor había intervenido en el control del vehículo. El personal técnico de Dongche Di explicó que esto fue causado por un conflicto del sistema debido a la interrupción de la función NCA tras la activación del AEB, y no por intervención humana. Aunque esta explicación es razonable, también expone la falta de transparencia en el proceso de prueba: si la parte que realiza la prueba pudiera publicar previamente procedimientos operativos más detallados y estándares de juicio, tales controversias podrían evitarse.
Una controversia más fundamental radica en la representatividad de las escenas de prueba. Las pruebas de Dongche Di se centraron en 15 escenas de alto riesgo, todas en situaciones estandarizadas preestablecidas. Sin embargo, el entorno real de las carreteras es mucho más complejo y variable, especialmente los fenómenos de tráfico únicos de las ciudades chinas, como la circulación aleatoria de bicicletas eléctricas, peatones cruzando barreras y vehículos no motorizados en sentido contrario, que no se reflejan en las pruebas. La crítica del responsable de Huawei ADS es acertada: "La verdadera competencia de conducción inteligente debería llevarse a cabo en escenarios complejos como aldeas urbanas y mercados de alimentos". La limitación de las escenas de prueba dificulta que los resultados reflejen de manera integral las diferencias en el rendimiento de los sistemas en el uso real.
Las dudas sobre las marcas también merecen atención. Algunos internautas señalaron que el inversor detrás de Dongche Di, Sequoia Capital, también ha invertido en Tesla, lo que genera sospechas sobre un posible sesgo de "capital enredado" en las pruebas. Aunque Dongche Di enfatiza que las pruebas se organizaron en conjunto con la CCTV y que se grabaron sin edición, la relación de capital puede afectar la confianza del público. La fría respuesta de "no comentar" de Hongmeng Zhixing también sugiere que algunas empresas automotrices tienen reservas sobre la imparcialidad de las pruebas.
Detrás de estas controversias se refleja un problema profundo de la falta de un sistema de estándares en la industria de la conducción inteligente. Actualmente, China aún no ha establecido un estándar de evaluación de pruebas de conducción inteligente unificado a nivel nacional o de la industria, y cada institución de evaluación diseña sus propios planes de prueba, lo que dificulta la comparación de resultados. La sugerencia del CEO de Ideal Auto, Li Xiang, es bastante constructiva: "Debería establecerse un estándar de prueba unificado que incluya 100,000 escenarios, abarcando condiciones extremas como lluvias intensas, nocturnidad, túneles, etc.". Se informa que la Asociación de la Industria Automotriz de China ha iniciado el trabajo de elaboración de las "Normas de Evaluación de Pruebas de Sistemas de Conducción Inteligente", que se planea implementar en 2026, lo que ayudará a mejorar la validez científica y la credibilidad de las evaluaciones en la industria.
Otro problema clave es el límite funcional de los sistemas L2. Todos los modelos de vehículos en las pruebas estaban equipados con sistemas de asistencia a la conducción de nivel L2, cuyo propósito de diseño es ayudar y no reemplazar al conductor humano. Wang Qiang, subdirector de la Administración de Tráfico del Ministerio de Seguridad Pública, declaró claramente: "Los sistemas de conducción inteligente que se venden actualmente en el mercado chino no tienen funciones de conducción automática". Esto significa que, independientemente de los resultados de las pruebas, los conductores deben mantener la atención en todo momento y estar listos para retomar el control del vehículo. Algunas empresas automotrices han exagerado las capacidades de "conducción automática", lo que ha llevado a los consumidores a tener expectativas poco realistas sobre el rendimiento del sistema, y esta es también la razón por la que existe una discrepancia entre los resultados de las pruebas y la percepción pública.